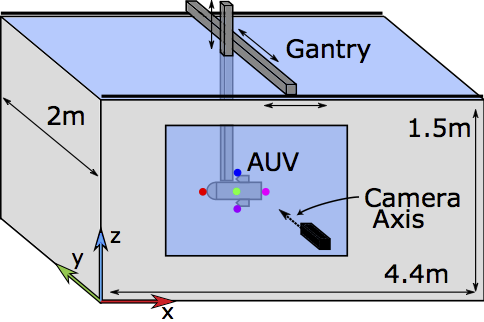
An important problem in the area of underwater robotics is localization. In order to do useful things, a robot needs to know its position in space. Unlike ground and air robots, underwater robots cannot rely on GPS, because GPS simply does not work underwater. Recently we have conducted a series of experiments to localize our HippoCampus robot in a confined tank with a monocular camera. HippoCampus was equipped with active markers of different colors, which the camera can observe. The manuscript, which describes the method and the results, was recently accepted to the International Conference on Intelligent Robots and Systems (IROS), which will take place in Vancouver in September.
